At Interaktionswerk, I led the design of RoboHive UI for Leverage Robotics—a next-generation interface for programming robotic workflows. In close collaboration with the client’s engineering team, I was responsible for strategy, design direction, and execution. The goal: transform a highly technical, code-heavy process into a system that feels intuitive—even to those without programming experience.
Client
Leverage Robotics
Deliverables
Design System, Design Concept, Prototype
Duration
7 months (2024)
Role
Design Lead



The Challange
Most robotics software is built for experts—complex, rigid, and hard to scale. Leverage Robotics wanted to lower that barrier, making automation accessible without losing the precision required in industrial settings. The challenge was to strike a balance between power and simplicity: could we build a programming tool that was both technically robust and visually approachable?





A Visual Approach to Programming
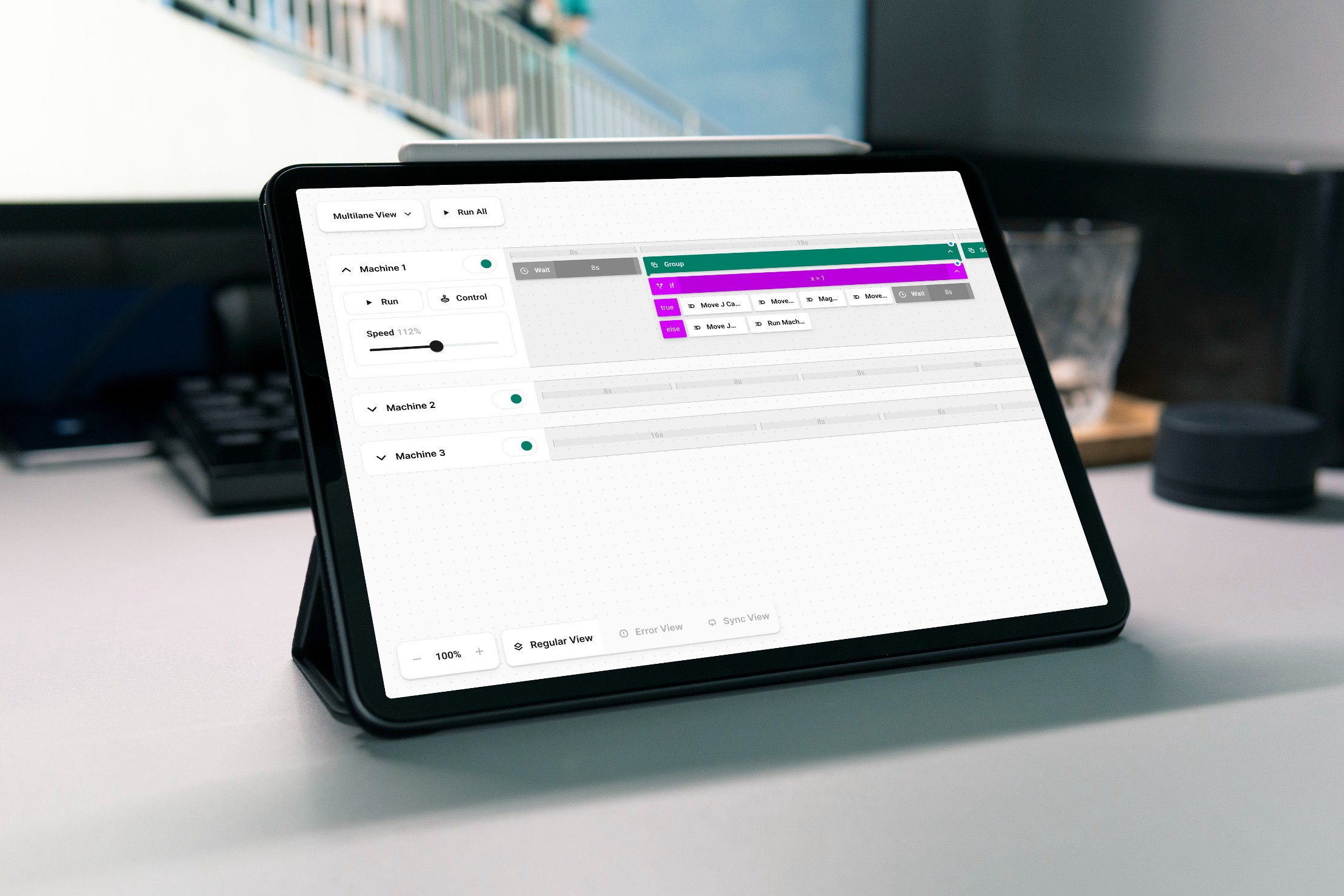
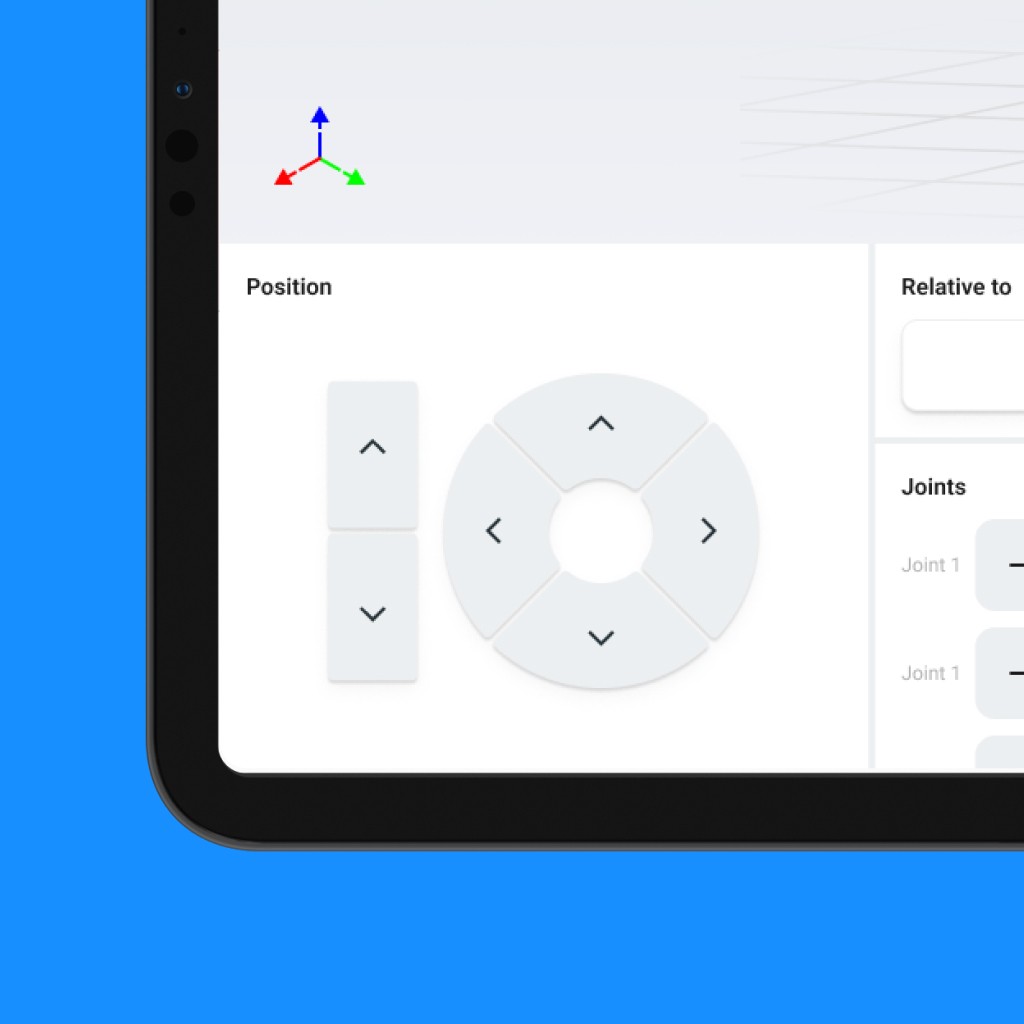
We replaced traditional coding views with a timeline-based system that uses visual blocks—allowing users to build and edit workflows like in a video editor. I introduced multi-lane structures for managing parallel processes, a dedicated manipulation view for different robot modes, and an embedded fallback layer for quick error-handling—all within the same visual flow.




From Idea to Deployment
Through iterative prototyping and continuous feedback loops, we moved from concept to production in under seven months. RoboHive UI is now live—offering a clean, scalable, and future-ready interface that redefines how industrial workflows are built and managed.


Successful Implementation & Deployment
Following the design and development phase, RoboHive UI was successfully deployed. The result: an intuitive and scalable system that makes robotic workflow programming more accessible, structured, and visually clear.